Вот этот запрос — ?дешево роботизированные тренажеры? — он постоянно всплывает в разговорах с закупщиками клиник и частными центрами. Все хотят сэкономить, и это понятно. Но часто за этим стоит непонимание: а что, собственно, скрывается за словом ?дешево? в контексте роботизированной реабилитации? Это не просто цена в каталоге. Это совокупность стоимости владения: обслуживание, ремонтопригодность, износ компонентов, безопасность пациента и, в конечном итоге, результат, который получит человек после курса. Многие ошибочно полагают, что можно взять простой электропривод, прицепить его к конструкции — и вот он, робот. На деле же дешевизна часто оборачивается частыми поломками, ограниченным функционалом, который не позволяет индивидуально настраивать протокол под конкретные нарушения, и в итоге — разочарованием и простаивающим оборудованием в углу зала.
Если посмотреть на предложения, то сегмент условно-бюджетных решений заполнен аппаратами с крайне ограниченной обратной связью. Часто это пассивные тренажеры с заданной траекторией, которые лишь двигают конечность пациента по фиксированной схеме. Для ранних этапов, может, и подойдет, но о нейропластичности, адаптивном управлении и точной биомеханической коррекции речи нет. Видел такие образцы, где сенсоры силы и положения — это дешевые потенциометры и нагрузочные ячейки с высоким уровнем шума. Данные с них нестабильны, программное обеспечение не может адекватно оценить усилие пациента, а значит, и адаптировать помощь. В итоге терапия превращается в механическое повторение движений, эффективность которого, мягко говоря, спорна.
Ключевой момент, который упускают — это роботизированные тренажеры для реабилитации как система. Робот — это не только ?железо?. Это в первую очередь алгоритмы, софт, который интерпретирует данные и принимает решения в реальном времени. Дешевые системы экономят именно на этом: на разработке сложного ПО, на качественных датчиках, на исследованиях в области биомеханики. В результате вы получаете красивый корпус, но с ?интеллектом? на уровне простейшего микроконтроллера. Это тупиковый путь.
Здесь стоит сделать отступление про наш опыт. Мы, как Steelforce Industrial Co., Ltd., изначально шли по пути создания надежных механических решений для передвижения (кресла-каталки, опоры). Переход к робототехнике был закономерным, но мы понимали, что нельзя просто взять и сделать ?дешевый аналог? дорогих систем. Наш сайт force-medical.ru отражает эту философию: мы специализируемся на продукции премиум-класса, но с четким пониманием, что надежность и обоснованная функциональность — это тоже форма экономии для клиента в долгосрочной перспективе.
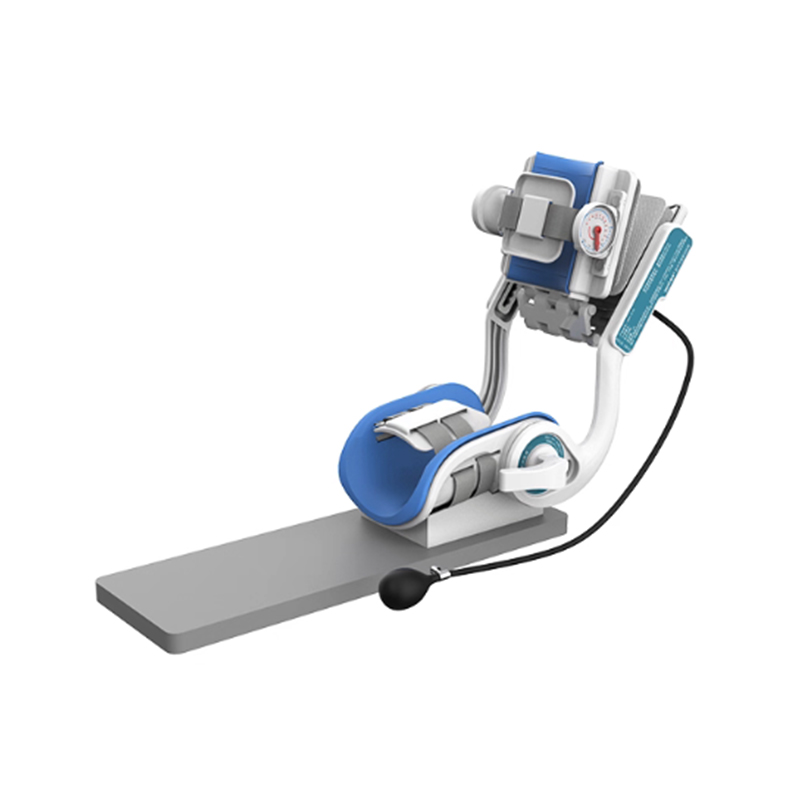
Итак, возможно ли вообще говорить о дешево роботизированные тренажеры без потери качества? Да, но с оговорками. Компромисс лежит не в области упрощения системы, а в области ее специализации. Вместо того чтобы создавать универсального робота ?на все случаи жизни?, что невероятно дорого, можно разработать целевые устройства. Например, роботизированный модуль исключительно для разработки лучезапястного сустава и кисти, или для механотерапии голеностопа. Снижение степеней свободы, отказ от избыточных для конкретной задачи функций позволяет оптимизировать стоимость, сохранив при этом высокую точность и адаптивность в своей узкой нише.
Еще один путь — модульность. Не продавать целый стационарный комплекс, а создавать базовую платформу, к которой можно докупать и присоединять различные исполнительные модули для рук, ног, для пассивной или активной тренировки. Это снижает первоначальный взнос для учреждения и дает возможность масштабировать реабилитационный арсенал по мере необходимости. Но тут встает вопрос стандартизации интерфейсов и обеспечения абсолютной безопасности соединений — задачи нетривиальные.
Мы в Steelforce Industrial Co., Ltd. пробовали пойти по пути модульности в некоторых своих разработках. Скажу честно, это сложнее, чем кажется. Требуются иные инженерные решения, более продуманная архитектура продукта. Иногда кажется, что проще сделать монолитную конструкцию — она и надежнее с механической точки зрения. Но запрос рынка на гибкость и относительно дешево роботизированные тренажеры заставляет искать эти компромиссы. Пока что наиболее успешными оказались гибридные решения, где базовая, самая дорогая часть (система управления, блок питания, безопасность) унифицирована, а сменные рабочие органы относительно недороги в производстве.
Был у нас опыт работы над прототипом локтевого тренажера. Хотели максимально удешевить, использовали коммерческие электродвигатели из сегмента DIY-робототехники и открытое ПО. Получилось действительно недорого в производстве. Но на первых же клинических испытаниях в партнерском центре вылезли все проблемы: моторы перегревались после 20 минут работы, шумовые помехи с датчиков были таковы, что алгоритм не мог отличить мышечное усилие пациента от дрожания самого механизма. А самое главное — не удалось обеспечить плавность хода на малых скоростях, что критично для реабилитации. Проект пришлось заморозить и вернуться к чертежам.
Этот провал стал хорошим уроком. Он показал, что есть компоненты, на которых экономить категорически нельзя: это прецизионные приводы с обратной связью по положению и моменту, и высококачественные аналоговые датчики силы. Сэкономив на них, ты теряешь саму суть роботизированные тренажеры для реабилитации — точность и адаптивность. Теперь наш подход иной: мы ищем оптимизацию в проектировании корпусов, в использовании современных композитных материалов для облегчения конструкции, в эффективном производстве, но не в сердце и нервах системы.
Еще один частый источник проблем в бюджетных моделях — программное обеспечение и интерфейс. Видел системы, где меню настолько запутанное, а инструкция настолько сложная, что медсестры или инструкторы ЛФК просто отказывались их осваивать. Аппарат простаивал. Поэтому сейчас мы уделяем огромное внимание UX/UI для наших продуктов. Интерфейс должен быть интуитивным, настройка протокола — быстрой, а отчеты — понятными для врача. Это та ?невидимая? часть стоимости, которая напрямую влияет на конечную полезность аппарата, но в дешевых моделях ей почти никогда не занимаются всерьез.
Вернемся к идее специализации. Один из наших относительно успешных проектов в этом ключе — это роботизированный модуль для механотерапии пальцев кисти после инсультов и травм. Мы не стали делать полноценную руку с 7 степенями свободы. Сфокусировались на основных захватах: цилиндрическом, щипковом, ладонном. Разработали компактный приводной блок и индивидуальные, печатаемые на 3D-принтере по слепку кисти пациента, ортезы-насадки.
За счет узкой специализации удалось использовать менее мощные, но более точные моторы, упростить кинематическую схему и, как следствие, снизить конечную стоимость аппарата. При этом функционал для конкретной задачи остался на высоком уровне: есть и пассивная разработка, и режим помощи движению, и полностью активная тренировка с игровыми сценариями на экране для мотивации пациента. Это не универсальный робот, но он отлично закрывает свою нишу и по цене доступнее комплексных систем в разы. Это, пожалуй, и есть наш ответ на запрос дешево роботизированные тренажеры — не дешевые, а доступные за счет фокуса.
Внедрение таких модулей в несколько региональных центров показало важный момент: часто клинике не нужен ?робот на все случаи жизни?. Нужен аппарат, который эффективно решит конкретную, частую проблему у большой группы пациентов. И если такой аппарат будет стоить в 3-4 раза меньше швейцарского или немецкого аналога широкого профиля, но при этом справится со своей задачей на отлично — это и будет той самой разумной экономией. Именно на это мы и ориентируемся в новых разработках.
Если смотреть вперед, то тренд на удешевление будет продолжаться, но не за счет качества компонентов, а за счет новых технологий производства и материалов. Например, аддитивные технологии (3D-печать металлом и высокопрочными полимерами) уже сейчас позволяют создавать сложные, облегченные и прочные конструкции без дорогостоящей оснастки для литья. Это снижает порог входа для производства малых серий, что как раз актуально для специализированных реабилитационных тренажеров.
Другой вектор — это развитие облачных сервисов и телемедицины. Дешевый, по сути, терминал (сам тренажер) с базовой вычислительной мощностью может получать сложные алгоритмы обработки данных и индивидуальные протоколы из облака по подписке. Это меняет бизнес-модель: можно снизить стоимость ?железа?, перенеся часть стоимости на сервис. Но здесь возникают вопросы защиты персональных данных пациентов и стабильности интернет-соединения в регионах — проблемы, которые еще предстоит решить.
В итоге, мое глубокое убеждение, сформированное на практике, таково: запрос на дешево роботизированные тренажеры для реабилитации — это здоровый и правильный запрос рынка. Но отвечать на него нужно не созданием низкокачественных изделий, а интеллектуальным инжинирингом: специализацией, модульностью, применением новых технологий и, что крайне важно, бескомпромиссным подходом к безопасности и точности ключевых компонентов. Цель — не просто продать устройство с низкой ценником, а обеспечить с его помощью реальную, измеримую и повторяемую эффективность реабилитации. Только тогда ?доступность? будет иметь смысл. А компании вроде нашей, Steelforce Industrial Co., Ltd., видят свою задачу именно в этом — находить технологические компромиссы, которые не идут вразрез с качеством результата для конечного пациента.